(转)beansdb
是beansdb的一些资料整理和总结
转自这里 http://sunisdown.me/gobeansdb-jia-gou-she-ji.html
为什么要自己实现一套 k/v 存储
我在刚刚接手 GoBeansDB 的时候,想过这个问题。既然有那么多优秀的数据库系统,为什么豆瓣还需要自己重新实现一套 k/v 存储? 这个问题可以拆分成两个方面,一个是为什么要用 K/V 数据库。一个是为什么要自己造轮子。
- 首先是因为数据大,而且数据是非结构化数据,像豆瓣的日记,就是一批很长的字符串。
- 其次是非常多的随机读。
- 有的时候会有大量的写操作
- 不需要外键什么的
上面四点可以排除掉类似 MySQL 这种传统的关系型数据库。
排除掉传统的关系行数据库之后,就需要对比现存的 K/V 数据库。
现在比较流行的 K/V 数据库有 LevelDB , MongoDB ,还有 Cassandra ,现在看来这些项目都足够成熟。但是如果追溯到 BeansDB 项目最开始的时候,也就是 2012 年的时候,那个时间点并没有太好的选择。即使现在看来,除了 Cassandra 之外,像 LevelDB, MongoDB 也不能满足我们的目标:
- 读写都需要比较低的 latency
- 数据量非常大,所以数据要写在磁盘上,数据库需要能够容纳比内存大的多的数据
- 高可用,单点故障不影响系统正常运行
- 高吞吐,尤其是针对写操作
- 能够快速恢复有问题的节点
这 5 点也可以排除调 MongoDB 与 LevelDB 。
当然上面这些都是我做的推断,但是这些应该都不是最主要的原因。最主要的原因应该是豆瓣的工程师文化比较好,鼓励工程师去寻找一个最贴合业务的解决方案,并且这个工程师的团队还足够强,两者缺一不可。如果没有很强的工程师文化,可能会直接引入开源的解决方案,虽然不一定合适,但是应该足够解决痛点。如果工程师实力不够,也就没有能力去自己实现一套类似的系统。而且与其去引入一个复杂的,自己无法完全掌控的开源项目,不如自己实现一套贴合业务的,简单的系统。这样内部可以根据业务的需要来作调整,同时自己实现一个系统也比完全掌握一个庞大的开源项目要简单。一旦出现问题也比较容易找到问题所在。
为什么要用 Go 重新实现 BeansDB
BeansDB 是用 C 来实现的,为什么现在改用 Go 来实现?
- 一个很重要的原因是 Go 的代码相比与 C 更容易维护。对一个工程师而言,Go 的学习成本比 C 要低很多。
- 用 Go 可以比较快速的写出健壮的系统,而用 C 来写的话,则需要一定的经验积累。
- Go 提供了可用的测试框架,写测试相对于 C/C++ 要方便
- Go 标准库里面提供了方便的性能分析工具,用 C 也有类似的工具,但是做不到开箱即用
- 还有 Go 的标准库也足够完善,不需要用 C 来重复造轮子。
- Go 的执行效率虽然比 C 差,但是 BeansDB 的瓶颈是 IOPS,所以 Go 的执行效率并不会成为瓶颈。
GoBeansDB 的架构设计
GoBeansDB 是基于 Dynamo 与 Bitcask 两篇论文来做的实现,这里优先讨论基于 Bitcask 实现的存储引擎。Bitcask 有一个缺点在于所有的 key 值都必须放在内存里面,GoBeansDB 这这个基础之上做了一些优化,绕过了 Bitcask 这个痛点。
GobeansDB 的存储有有两个比较重要的组成部分,一个是索引(htree),一个是数据文件(data)。索引与数据文件组成 Bucket。Bucket 的概念类似与关系行数据库里面的 table,在 GoBeansDB 的实现中就是给一个 Bucket 分配一个文件夹,这个文件夹下面放着相关的数据。每个 Bucket 下面一次只允许打开一个文件。打开的这个文件会一直保持打开的状态,一直等到追加到活跃文件超出阈值。文件超出阈值之后就关闭,然后新建一个新的继续添加。data 文件一旦关闭之后,文件就转换成为不活跃的数据文件。无法再往这个 data 文件上面追加数据。
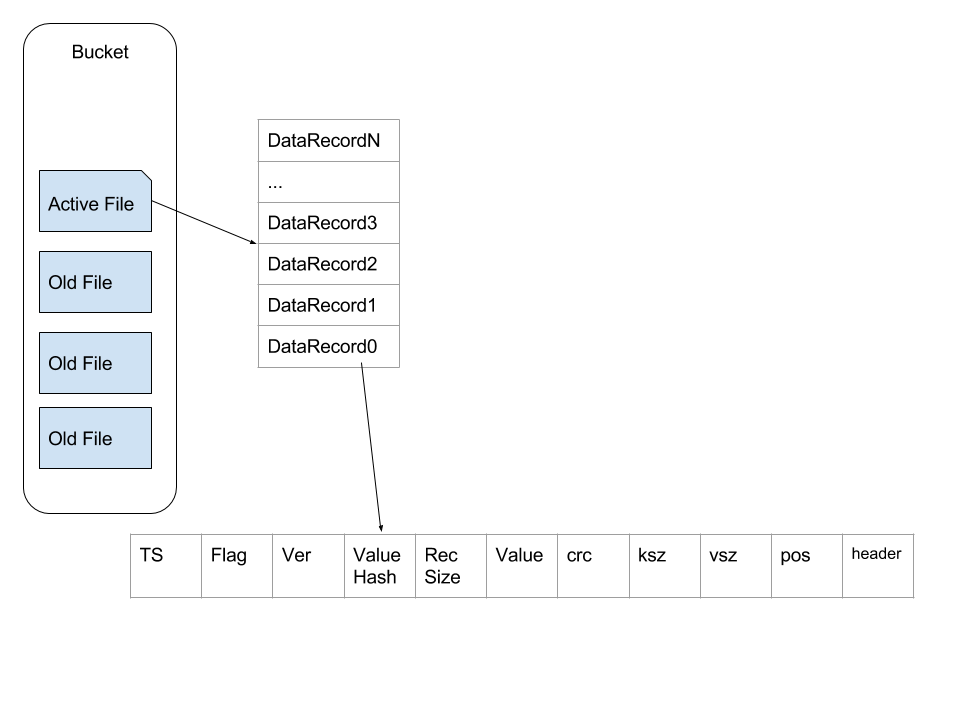
状态为 active 的数据文件只做追加操作,这样连续的写入操作也不会明显增加磁盘的 IO 使用量。这种设计也极大的简化了数据的写入操作。
上面的图简单描述了 Bucket 内部文件的架构,每条数据里面包含TS(TimeStamp),Flag,Ver(Version),ValueHash,RecSize(单条记录的主要内容的大小),Value,crc(key,value,header 的 crc),ksz(Key Size),vsz(Value Size),pos(Position,这条记录在文件中的位置),Header。
当插入新数据的时候,直接在文件尾部添加这种结构的数据。删除操作是对原有的数据做更新操作,并将 Ver 绝对值+1,转变为负数。
在文件写入完成之后,需要更新内存里面的数据结构,也就是前面提到的 HTree,HTree 是一个 Hash Tree,结构如下
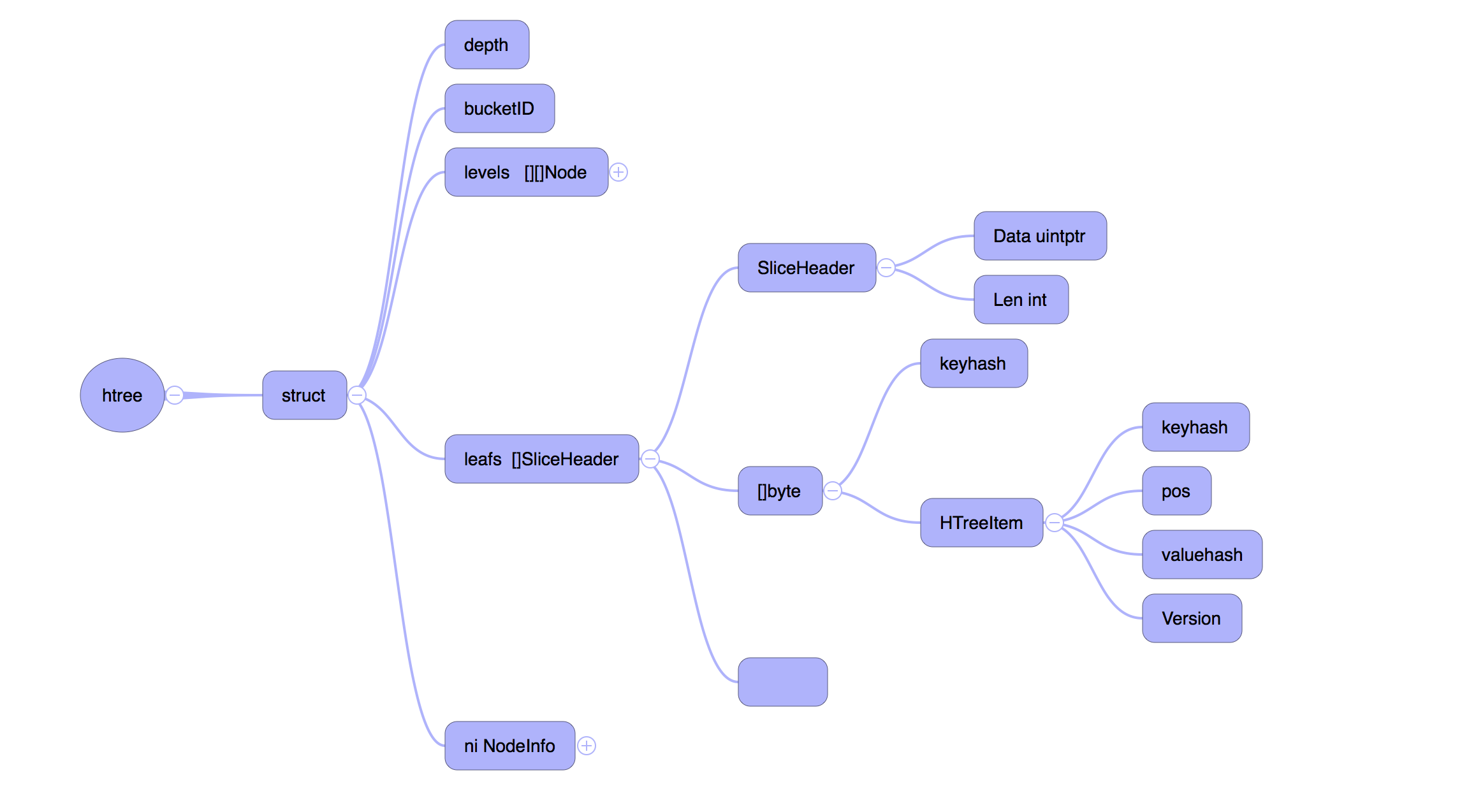
levels 表示真实的树状结构, leafs 是树的叶子,保存着真实的数据。
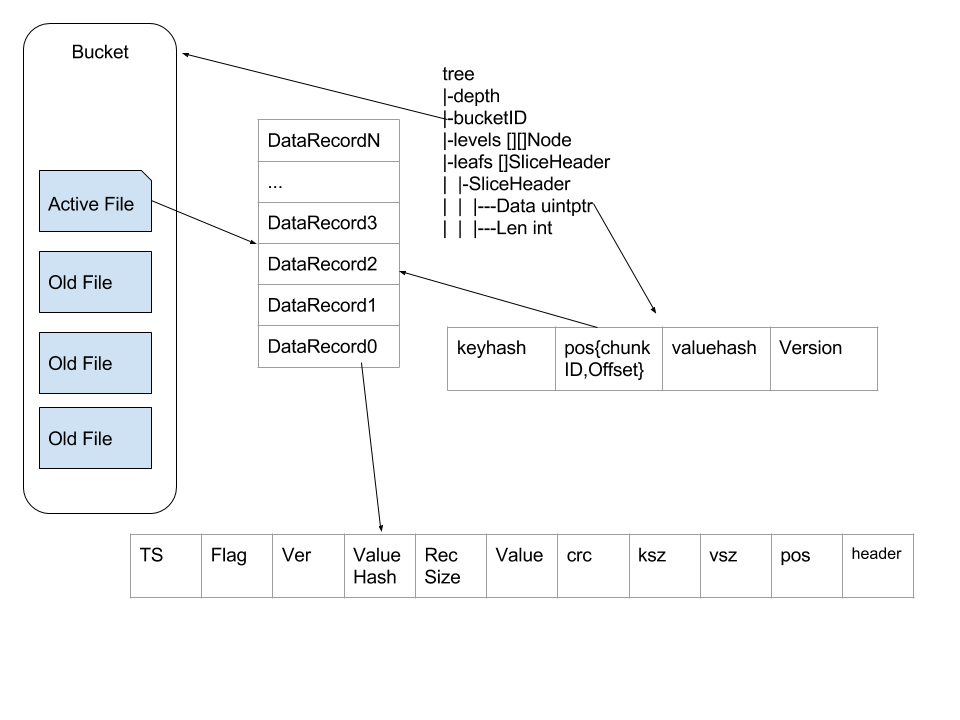
这种数据结构下读取一个值也非常简单,大多数情况下最多只需要一次 seek 。我们首先在 Htree 中通过 levels 找到 key 对应的 leafs , 然后通过 leafs 里面的报错的 Pos 来拿到文件编号(chunkID)以及 offset,这样就可以通过文件编号(chunkID)和 offset 来拿到保存的数据。在很多情况下文件系统的缓存会让这个读操作比预期的要快。
到这里关于 GoBeansDB wirte/delete/read 相关的操作都已经基本完成。但是仅仅这样还不能完备。
GC 操作
GoBeansDB 的模型非常简单,write/delete 操作都是在文件尾部追加新的数据,这样存在一个问题就是占用的磁盘空间比真实的数据要多。所以我们引入了 GC 机制来回收垃圾,释放内存与磁盘空间。
在 GoBeansDB 中,通过增量 GC 来减小 GC 的开销。xiufeng 通过分析 BeansDB 的日志,统计出一条新写入的数据,修改操作基本在写入之后的 7 天之内,所以我们保留 7 天之内的新数据不做 GC。然后在每天晚上,访问量较低的时候,分批做增量 GC。
GC 的过程是将 datafile 里面已经过时的数据清除掉,比如旧版本的value,已经标记为删除掉的key。
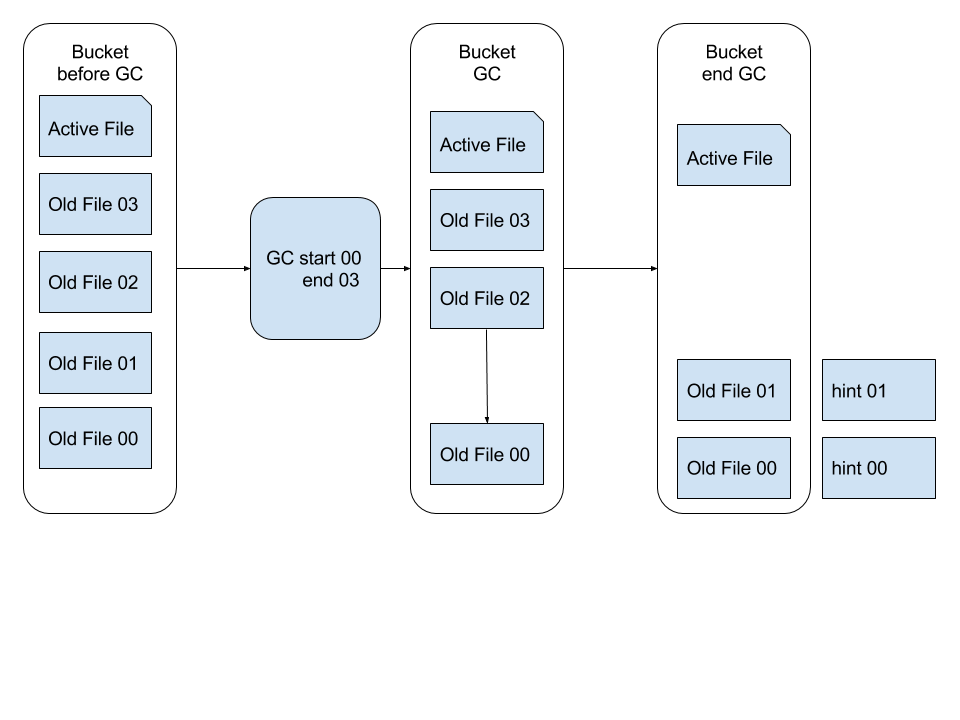
如 上图所示,GC 会读取状态为不活跃的数据文件,用其中存活的数据或者最新版本的数据生成一份新的数据文件,同时为这个新的数据文件创建一个 hint file。
c的代码走读
hstore
main -> 各种init -> store = hs_open(dbhome, height, before_time, settings.num_threads); -> bc_scan -> scanHintFile根据hintRecord能重建 hashtree -> thread_init(settings.num_threads); -> pthread_create(&flush_id, NULL, do_flush, NULL) -> loop_run(settings.num_threads);
hs是重点 应该代表hashtree,会根据hashtree的高度创建 2 的 4* 高度次方个bitcask实例。然后各个实例下面来进行实际的动作
inline int get_index(HStore *store, char *key)
{
if (store->height == 0) return 0;
uint32_t h = fnv1a(key, strlen(key));
return h >> ((8 - store->height) * 4);
}
hstore有锁
struct t_hstore {
int height, count;
time_t before;
int scan_threads;
int op_start, op_end, op_limit; // for optimization
Mgr* mgr;
pthread_mutex_t locks[NUM_OF_MUTEX];
Bitcask* bitcasks[];
};
这个锁只在hs_append和hs_incr上会加锁,因为涉及到get
bitcask内部有三个锁
struct bitcask_t {
uint32_t depth, pos;
time_t before;
Mgr *mgr;
HTree *tree, *curr_tree;
int last_snapshot;
int curr;
uint64_t bytes, curr_bytes;
char *write_buffer;
time_t last_flush_time;
uint32_t wbuf_size, wbuf_start_pos, wbuf_curr_pos;
pthread_mutex_t flush_lock, buffer_lock, write_lock;
int optimize_flag;
};
本身是一个服务而不是一个嵌入式的库,锁多可以理解。
CURD
hs_set -> get_index -> bc_set -> pthread_mutex_lock(&bc->write_lock); -> ht_get 根据key查hashtree拿到value的指针。可以比较value hash,如果hash相同,区分不出,那就去拿到实际的value比较value bc_get(bc, key); -> 有版本信息,ht_add(bc->tree, key, it->pos, it->hash, ver); 更新版本 通常逻辑,走append -> pthread_mutex_lock(&bc->buffer_lock); -> 如果空间不够走bc_flush -> 重新分配buffer -> bc_rotate -> build_thread -> build_hint -> ht_add(bc->curr_tree, key, pos, hash, ver); 这里tree和curr_tree都更新了。为啥需要两个hashtree? -> tree也有个锁 pthread_mutex_lock(&tree->lock);
hs_get -> get_index -> bc_get DataRecord -> ht_get -> check_key -> 锁tree -> get_item_hash 虽然是hashtree,但是get没用上hash,前面用到了,tree内部还是对比key
hashtree 和hint文件的关系
hashtree 构成,Node -> Data -> Item
struct t_item {
uint32_t pos;
int32_t ver;
uint16_t hash;
uint8_t length;
char key[1];
};
如何定位到Node?
通过build_hint生成hint -> ht_visit(tree, collect_items, &p); -> lock, visit node, -> collect_items -> write_hint_file(p.buf, p.curr, hintpath);
typedef struct hint_record {
uint32_t ksize:8;
uint32_t pos:24;
int32_t version;
uint16_t hash;
char key[NAME_IN_RECORD]; // allign
} HintRecord;
hint文件是key hash pos,通过这个就构建出hashtree了
void scanHintFile(HTree* tree, int bucket, const char* path, const char* new_path)
{
HintFile* hint = open_hint(path, new_path);
char *p = hint->buf, *end = hint->buf + hint->size;
while (p < end) {
HintRecord *r = (HintRecord*) p;
p += sizeof(HintRecord) - NAME_IN_RECORD + r->ksize + 1;
if (p > end){
break;
}
uint32_t pos = (r->pos << 8) | (bucket & 0xff);
if (r->version > 0)
ht_add2(tree, r->key, r->ksize, pos, r->hash, r->version);
else
ht_remove2(tree, r->key, r->ksize);
}
close_hint(hint);
}
这个hint用rocksdb存也是可以的,scan一遍就重新构造出来了。问题在于什么时候hint文件落地?会存在hashtree和hint不对应的场景么?
越看越眼熟。这和blobdb差不太多吧,无非索引有差别,一个是hashtree一个是skiplist
如果把rocksdb用hashtable替换skiplist我估计差不多吧
ref
- https://blog.csdn.net/lemonk3664/article/details/9970293
- 作者的记录 比较bitcask https://www.douban.com/note/122507891/
- https://github.com/douban/beansdb 代码
- https://github.com/douban/gobeansdb/ 后面他们用go实现了
- https://zhuanlan.zhihu.com/p/53682577 提到了c版本的优化,位域之类的
